3 Deformation
Strain is the term introduced in continuum mechanics for local deformation in a material, i.e., deformation in the neighborhood of a particle. Such local deformation is normally represented by changes in material lines, angles and volume. Correspondingly, three primary measures of strain is introduced; longitudinal strain \( \epsilon \), shear strain \( \gamma \), and volumetric strain \( \epsilon_v \).
3.1 Measures of strain
Figure 17: Deformation of a body by relating the current configuration (\( K,t \)) to the reference configuration(\( K_0,t_0 \).
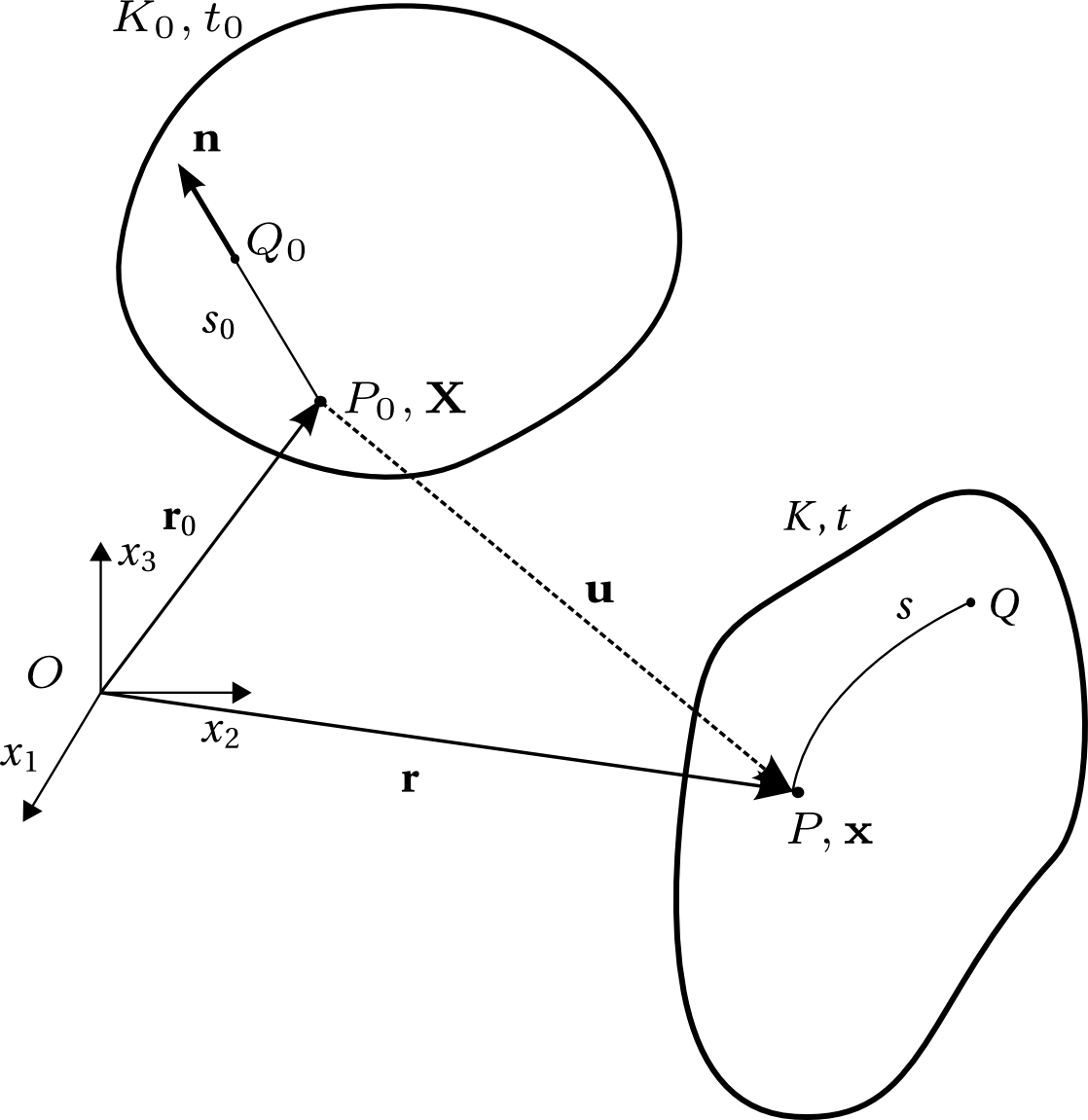
In Figure 17 a body is represented in the current configuration \( K \) at time \( t \) and in the reference configuration \( K_0 \) at time \( t_0 \). The position of an arbitrary particle, denoted \( P \), in the body in the current configuration \( K \) is given by \( \boldsymbol{r}(\boldsymbol{r}_0,t) \), where \( \boldsymbol{r}_0 \) is the location of the same particle, denoted \( P_0 \), in the reference configuration \( K_0 \). The set of coordinates of \( \boldsymbol{r}_0 \) is conventionally denoted \( X \) with corresponding spatial components \( X_1,X_2,X_3 \). The terms location and particle are used interchangeably for convenience, and thus we may refer to the particle \( \boldsymbol{r}_0 \) or the particle \( X \).
The vector \( \boldsymbol{r}(\boldsymbol{r}_0,t) \) is a function which represents the motion of an arbitrary particle in the body, which originally had the position \( \boldsymbol{r}_0 \). It may also be thought of as a map between the reference and current configuration. The motion may be represented as vector valued function or by its components: $$ \begin{equation} \boldsymbol{r} = \boldsymbol{r}(\boldsymbol{r}_0,t) \Leftrightarrow x_i = x_i(X,t) \tag{3.1} \end{equation} $$
The displacement vector \( \boldsymbol{u}(\boldsymbol{r}_0,t) \) (see Figure 17 ) is also a function which represents motion relative to the original location: $$ \begin{equation} \boldsymbol{u}(\boldsymbol{r}_0,t) = \boldsymbol{r}(\boldsymbol{r}_0,t)-\boldsymbol{r}_0 \tag{3.2} \end{equation} $$
Figure 18: Deformation of a body from the current configuration (\( K,t \)) to the reference configuration(\( K_0,t_0 \).
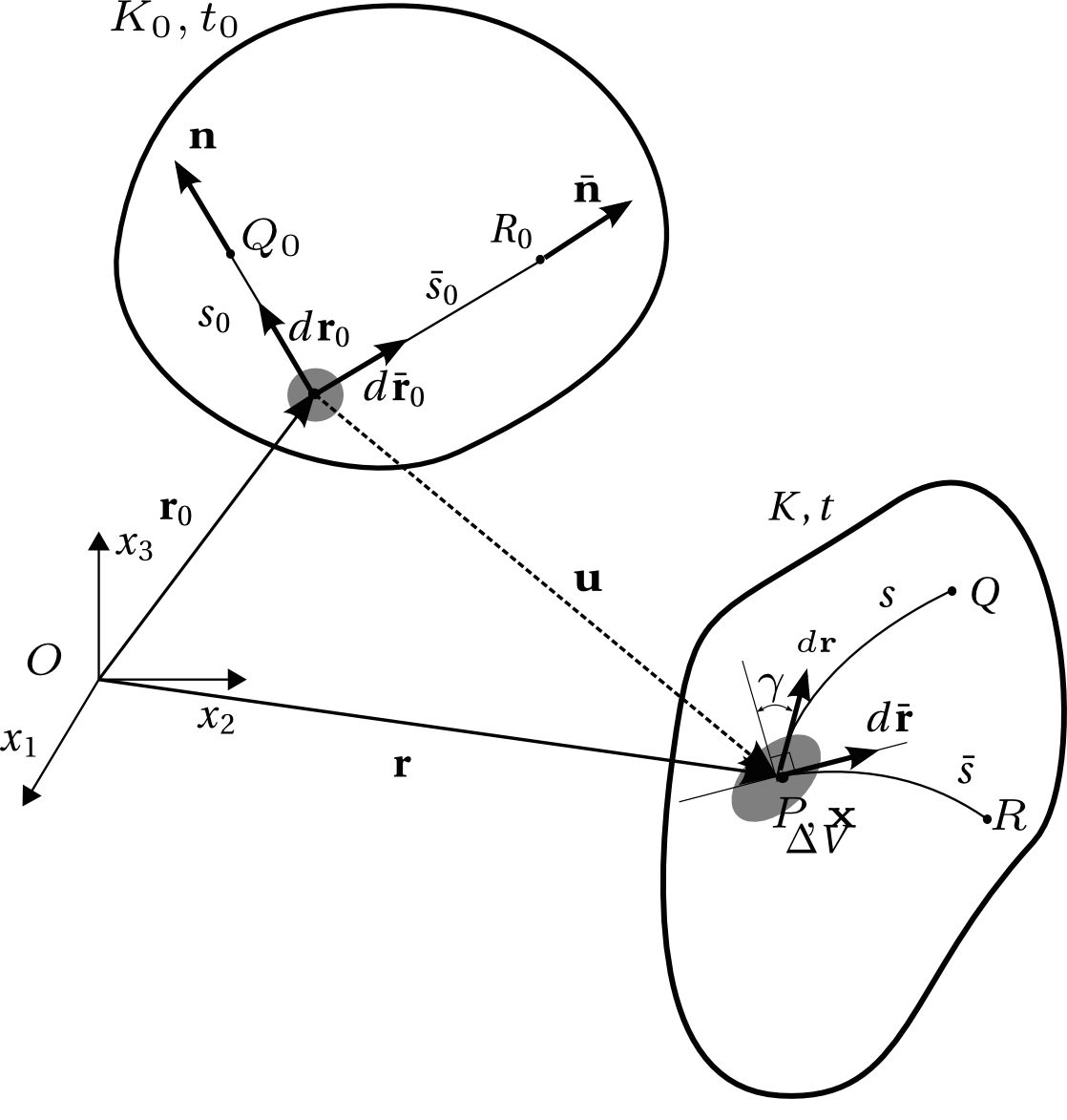
Let \( P_0 \) denote the point with coordinates \( \bf{r}_0 \) in$K_0$ Let \( s_0=P_0Q_0 \) denote the length the straight line from \( P_0 \) to \( Q_0 \) in the reference configuration \( K_0 \) from \( \bf{r}_0 \) in the direction of \( \boldsymbol{n} \). In general this line will change both form and length in the current configuration \( K \), where its length is represented by \( s=PQ \). Definitions of the three measures strain may then be formulated:
Longitudinal strain \( \epsilon \) The longitudinal strain \( \epsilon \) in the direction \( \boldsymbol{n} \) in a particle \( \boldsymbol{r}_0 \) is defined by: $$ \begin{equation} \epsilon= \lim_{s_0 \rightarrow 0} \frac{s-s_0}{s_0} = \frac{d s - d s_0}{d s_0} = \frac{d s}{d s_0} -1 \tag{3.3} \end{equation} $$
The longitudinal strain \( \epsilon \) represents the change of length per unit length in the direction of \( \boldsymbol{n} \) in particle \( \boldsymbol{r}_0 \).
Figure 18 illustrates the same situation as in Figure 17, albeit with some more details, allowing for the definition of shear strain:
Shear strain \( \gamma \) The angular deviation (in radians) from \( \pi/2 \) between two material lines in \( K \) which originally were perpendicular in \( K_0 \). The shear strain \( \gamma \), is taken to be positive when the angle is reduced.
In Figure 18, the shear strain \( \gamma \) is illustrated at the location \( \mathbf{r}_0 \), as the angular deviation from \( \pi/2 \) between \( \mathbf{n} \) and \( \mathbf{\bar{n}} \), two perpendicular material line elements in the reference configuration \( K_0 \).
Volumetric strain \( \epsilon_v \) $$ \begin{equation} \epsilon _v = \mathop {\lim }\limits_{\Delta V_0 \to 0} \frac{{\Delta V - \Delta V_0 }}{{\Delta V_0 }} \tag{3.4} \end{equation} $$
The volumetric strain \( \epsilon_v \) represents change in a differential volume per unit undeformed differential volume around the particle \( \boldsymbol{r}_0 \).
In the following, commonly used expressions for the primary measures of strain will be introduced.